4D成像雷达构建智慧交通
在交通强国战略背景下,智慧交通领域正不断推动前沿信息技术与传统交通行业的深度融合。发展智慧交通可保障交通安全、缓解拥堵难题、减少交通事故、提升交通通行效率。对于整个智慧交通落地实施的大环境来说,从国家顶层设计规划到省市落地执行,均有较多的政策支撑和影响。如:《城市公共交通“十三五”的发展纲要》、《交通强国建设纲要》、《数字交通发展规划纲要》、《交通科技领域科技创新中长期发展规划纲要(2021-2035)》、《“十四五”现代综合交通运输体系发展规划》等。

智慧交通创新应用需要前端路测感知设备采集的交通数据信息。作为智慧交通领域中具有极其重要应用的路端感知设备,毫米波雷达可以提供可靠、实时和准确的检测数据流信息,在技术和成本上具有优势。围绕毫米波雷达在智慧交通中的应用,4D点云成像感知雷达及构建的智慧交通整体解决方案,可满足不同智慧交通场景需求:
►车路协同:超视距交通环境感知
►智慧路口:人车、车车冲突预警
►自动驾驶:路线规划、运行效率提升
►AI+交通:交通拥堵、交通安全解析
传统的智慧交通解决方案通常为在交通系统每个节点安装传感器。可获得包括视频、线圈、微波检测和地磁检测等多种前端探测传感器的感应信息。但传感器之间信息呈现出碎片化、单一化、被动化等特点,无法满足新型智慧交通对交通数据流的实时性、全面性和主动性的需求。

同时,传统的交通感知设备存在以下痛点:
1)成本过高:单设备覆盖范围近、实现全路段覆盖的成本过高,无法实现真正的全路段智慧交通;
2)感知要素不够精细、质量较差:感知要素维度、密度、分配密度较低,设备漏报率高、准确率低,不能还原交通场景,难以支撑智慧交通的信息感知需求;
3)全天候、全天时能力差:如雨、雾等、沙尘暴、黑夜等各种天气状况对感知设备的感知能力 影响较大,无法做到在各种气象条件下的7*24小时不间断工作;
4)交通事件检测能力不足:检测手段单一,探测信息不够丰富,智能化分析手段不足,系统无 法对如交通 事故、交通违章行人进行有效判断。
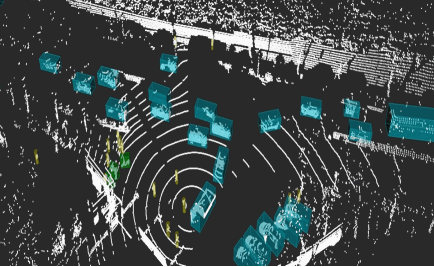
4D成像雷达主要有以下特点:
►达到像素级识别效果—>丰富感知要素
►相比传统3D雷达多一个测量维度—>提升交通事件检测能力
►基本原理仍是“毫米波雷达”—>保证全天时、全天候工作能力
可通过雷达的立体扫描,点云成像,最终实现图像级雷达,像视觉一样直观,像激光雷达一样准确。
4D成像雷达的技术创新优势包括硬件阵列设计、高分辨成像能力、雷达波形设计和目标识别分类能力,可实现交通环境中目标点云数量和质量的提升,复杂环境中雷达最远探测距离的提升以及点云信息底层融合、识别目标类型。
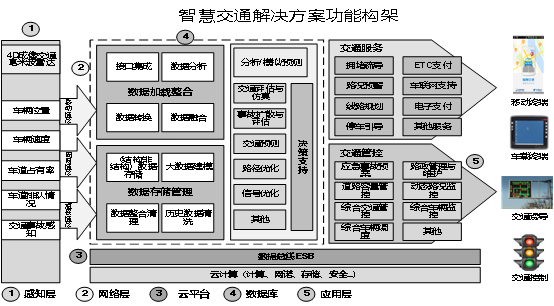
4D成像雷达作为感知层,可提供车辆位置、车道占有率、交通事故等检测信息,通过网路层转发通信到云平台,在平台层调用数据库,实现数据整合,并加以AI分析,最终将处理结果下发到应用层,可实现拥堵疏导、线路规划、综合交通管控、动态路况监控等交通服务和交通管控。
4D成像雷达在智慧交通领域的具体应用包括:
1)面向智慧交通管理:主要应用于城市路口的全要素自适应信号控制、违法抓拍辅助、车流量统计、非机动车检测;交通路段的车流量检测、全局车型分辨、事故检测、测速、拥堵检测;城乡道路中独立化的车流统计和人流预警系统。
2)面向V2X车联网路侧感知:主要应用于城市路口下的交叉路口碰撞预警、弱势交通参与者碰撞预警;交通路段的前向碰撞预警、紧急制动预警、协作式匝道汇入;城乡道路的感知数据共享,弱势交通参与者碰撞预警。