保姆级的飞行安全守护:4D成像雷达精准感知无人机飞行环境
无人机避障是指无人机可以实现自主躲避航线或飞行中遇到的障碍物,避免无人机和障碍物产生碰撞,造成损伤。障碍物可简单的分为三大类:大障碍、小障碍、动障碍。大障碍是指不可逾越的障碍,比如墙体、高楼、山等;小障碍是指电线杆、树木等可以躲避的障碍;动障碍是指人、畜、鸟及处于无人机飞行航线上的其它各类飞行器等运动体。无人机避障技术可简单分为三个阶段:
- 感知障碍物并停止:无人机感知到障碍物后快速识别并悬停,等待下一步指令;
- 获取障碍物四维信息并自主绕行阶段:无人机通过传感器精确感知到障碍物的具体轮廓后自主绕开障碍物;
- 建立区域地图合理规划路径阶段:无人机通过获取的环境信息,利用算法自动规划出飞行线路,从而实现自动避障的功能。
如同人类或其他动物在前进的过程中,只有先看见前方的障碍物,并且会大致估算出自己与障碍物之间的距离,才能决定下一步的行进方向。如何实现无人机自动避障,首先要实现的是如何精确测量无人机与障碍物之间的距离,只有先测量出危险范围内的距离,才可以有时间在撞向障碍物之前停止无人机的前进动作,或重新规划无人机的前进路径,避免事故的发生。
无人机在飞行工作时,特别是农业植保无人机,可能会遇到复杂的环境,例如飞行航线中可能出现电线、树木、房屋等障碍物,这些环境对无人机的避障提出了更高的要求。
目前运用较多的障碍物检测方法主要有:
|
|
优点 |
缺点 |
|
超声波 |
体积小、重量轻、价格低廉、不受光线、粉尘、烟雾干扰 |
易受如声波、风、温度变化等干扰,避障作用距离近等 |
|
激光雷达 |
探测相对距离远,精度高,白天黑夜全天候使用 |
需要漫反射物体才能检测,镜面物体测距效果不好;不能在太阳光的主要能量波段工作,会相互干扰;单线激光传感器,只能给出一个平面距离值,而三维激光雷达体积大,价格昂贵, |
|
TOF/结构光 |
类似阵面发射的多点激光,弥补单线雷达的不足,可以探测三维环境;探测精度高,深度图精准 |
探测量程比较短,只有2至6米;室外使用容易受到环境光干扰 |
|
双目视觉 |
省电、距离优秀,成本较低,精度高;结构简单、硬件系统简单、工作可靠性高 |
运算复杂,技术难度较高、延迟性高,无纹理的环境效果不好;辨识度很大程度上取决于物件的反光特性 |
|
普通毫米波雷达 |
抗干扰能力强、精度高、全天候工作、实时性强 |
分辨能力差、不具备俯仰检测能力、弱目标探测性能差 |
目前的障碍物检测手段各有优势,但均不满足无人机自主飞行避障的真实需求。
传统的毫米波雷达通过测量目标的距离和角度得到目标2D平面(横向+纵向)坐标以及速度信息,无法得到目标的高度信息。在无人机飞行避障过程中,毫米波雷达通常安装于无人机的机头和机尾部分,由于无人机的加速或减速 运动,机头或机尾存在较大角度的倾斜。当雷达向上倾斜时,雷达波束朝上,无法检测到处于无人机飞行航线高度的障碍物目标,造成漏报;当雷达向下倾斜时,雷达波束朝下,会检测到处于无人机飞行航线高度以下的地面目标,造成误报。
4D毫米波雷达在传统雷达的基础上,增加了对目标俯仰维度信息的解析,获取目标高度,实现目标的距离、速度、水平角度和俯仰角度四个维度信息的探测。4D成像雷达是一种基于4D高分辨点云成像的新型雷达技术,它的核心技术是高分辨和高密度点云成像。通过雷达的空间扫描,实现对周围环境立体成像,最终达到环境目标区分、目标轮廓描绘及目标点云融合分类识别等。
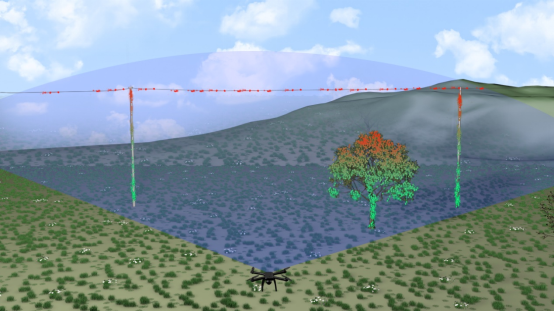
4D成像雷达应用于无人机的感知示意
将4D成像雷达应用到无人机避障中,可以让无人机具备全面环境感知能力,具备以下能力:
- 高精度测距和定位:4D成像雷达可以提供高精度的测距和定位信息,能够实现更准确的障碍物识别和避障;
- 俯仰维度感知:4D成像雷达能对目标的轮廓信息描绘,包括了目标的高度的信息,能避免由于障碍物高度信息探测不准确带来的误报和漏报;
- 超高灵敏度:4D成像雷达以点云信息的方式输出检测信息,对如斜拉线、枯树枝等目标具有超高的检测灵敏性;
- 实时性:4D成像雷达可以实时获取障碍物的距离和位置信息,能够快速响应避障需求,提高无人机的避障性能;
- 抗干扰能力强:4D成像雷达具有较强的抗干扰能力,能够在复杂的电磁环境中正常工作,适应于各种恶劣环境;
- 全天候工作:4D成像雷达不受光照和天气条件的影响,可以实现全天时、全天候工作;
- 高性价比:4D成像雷达的成像检测信息比拟激光雷达,但其价格相对同等级的激光雷达具有明显优势,可降低无人机的制造成本,提高市场竞争力;