机扫+相扫雷达分析
方位机扫+俯仰相扫雷达是一种高性能、高可靠性的三坐标雷达探测设备,主要用于对低空飞行器目标进行探测和定位。该雷达的工作体制采用相控阵体制,通过方位机扫和俯仰相扫实现对目标的探测和跟踪,可以实时、准确地给出目标的航迹信息,包括目标的空间位置、速度等信息。可广泛应用于监狱、机场、军事基地等场所,为安全保卫工作提供了有力的技术支持。这种雷达具有以下特点:
- 数据率高:采用高数据率的技术,可以快速、准确地获取目标的信息。
- 定位精度高:通过采用先进的信号处理和数据处理技术,可以实现对目标的精确定位。
- 可全天候使用:不受天气和时间的影响,可以在任何时间、任何天气条件下使用。
- 探测距离远:最大探测距离可达5公里以上,可以实现对远距离目标的探测和跟踪。
- 适应能力强:可以根据不同的任务需求进行临时架设或固定部署,具有很强的适应能力。
- 联动反制设备:可以联动光电系统、无线电干扰、导航诱骗等反制设备对目标进行处置。
方位机扫+俯仰相扫雷达结构原理如下:

该体制下的三坐标雷达的主要优势是成本低,对信号处理算法要求不高。在方位维度上,发射的天线单元每一行通过固定的移相方式已经合成一个带有窄波束天线方向图的单元,此时的方位波束指向通过机械平台旋转来实现。但为了提升方位角度分辨率和方位测角精度,需要在方位维度形成更窄的波束,此时方位维阵列口径需要加大,会增加成本。在俯仰维度上通过移相器实现波束在俯仰维扫描,为了保证俯仰维度角度精确测量,一般采用和差角度测量方法,此时会进行和、差波束AD采样,俯仰维阵列接收信号后,上半阵和下半阵分别进行和波束合成,然后二者相加、相减形成和差波束通道,所以只需要两路AD采样通道,前端变频通道也只需要进行两路,极大降低了成本。
但由于当前采用的雷达体制,会出现一些雷达技战术不足的地方,包括:
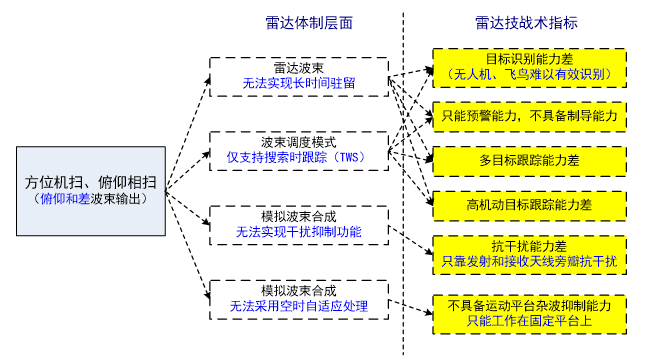
 机械旋转决定了无法实现波束的灵活捷变和长时间驻留,射频模拟合成使得无法进行自适应干扰抑制和杂波抑制,使得其存在以上不足。同时,该体制采用和差两通道,使其无法采用空时自适应处理算法(STAP),也无法进行空域干扰抑制(ADBF),所以最佳使用场景为要地防护、定点防护。但值得一提的是,该体制雷达无法实现高价值要地防护。
机械旋转决定了无法实现波束的灵活捷变和长时间驻留,射频模拟合成使得无法进行自适应干扰抑制和杂波抑制,使得其存在以上不足。同时,该体制采用和差两通道,使其无法采用空时自适应处理算法(STAP),也无法进行空域干扰抑制(ADBF),所以最佳使用场景为要地防护、定点防护。但值得一提的是,该体制雷达无法实现高价值要地防护。
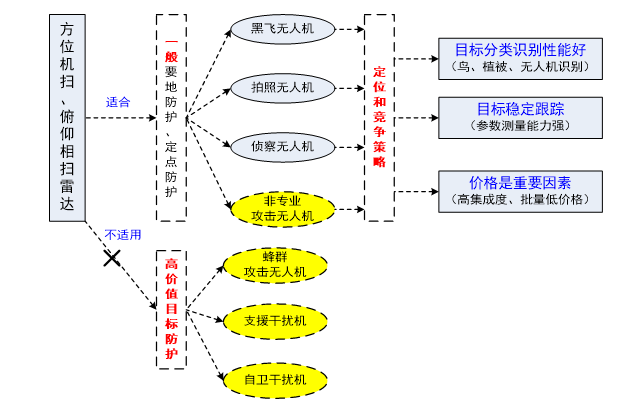

为了提升目标识别能力,实现对无人机目标稳定跟踪,针对该体制下的产品优化可以从距离分辨率提升、角度分辨率提升、目标RCS闪烁特性应用、基于人工智能目标分类、基于微多普勒特征目标分类等方面进行。