基于运动平台的无人机探测雷达系统
针对日益紧张的地缘冲突局势和低空安全威胁,对无人机的探测与反制能力亟需提升。雷达探测作为一种有效侦察无人机的手段,通过利用电磁波来扫描和侦测周围空域,获取无人机的位置、速度、高度等参数信息,这种方式可以快速准确地发现无人机的存在,并提供实时的监测和跟踪。但该方式正面临更多的挑战。为了探测到目标,雷达需与无人机保持在同一视线范围内,而无人机的机动飞行和随时改变飞行方向和速度的能力给雷达探测带来了困难。特别是在无人机进行悬停和垂直移动等飞行模式时,对于使用自动跟踪算法的探测系统来说,发现无人机可能更加困难。
目前无人机探测雷达基本基于静止平台,即雷达安装固定于静止物体上,由于静止平台的部署位置相对固定,一旦部署完成,不易更改,对于需要快速响应或临时任务的场景,灵活性较低;同时,部署在静止平台上的雷达覆盖范围受到安装位置和角度限制,可能无法覆盖所有需要探测的区域。
基于运动平台的无人机探测雷达系统,可将雷达部署于移动平台上,实现平台行进间的无人机探测功能,系统具有较高的灵活性和机动性,能够快速响应任务需要,在平台行进中对“来袭”无人机目标进行准确的探测和跟踪,达到预警目的,为主动防御提供可靠依据和缓冲时间。

系统采用四面阵组合,每个面阵方位面覆盖90°的区域,俯仰面覆盖90°的区域。每个雷达阵面均由 个阵元组成,其中P为水平面阵元数,Q为俯仰面阵元数。
个阵元组成,其中P为水平面阵元数,Q为俯仰面阵元数。

对部分阵元进行模拟波束形成后,得到个子阵,其中M为水平维子阵数,N为俯仰维子阵数,如下图所示(M=4,N=4)。

对雷达的子阵级数据进行ADC采样后,得到的阵元信号,然后对阵列信号进行雷达信号处理,用于单面阵列的目标检测,信号处理流程主要包括:脉冲压缩、脉冲积累、空时自适应处理(STAP)、CFAR检测以及参数测量。

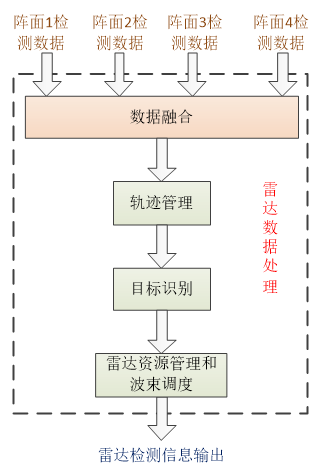
雷达数据处理部分主要包括:数据融合、轨迹管理、目标识别以及雷达资源管理和波束调度。数据融合则将多个阵面的雷达检测数据进行聚类融合;轨迹管理则进行点迹和航迹的匹配以及目标航迹的滤波处理;目标识别则通过雷达检测的目标特征信息进行判断,去除地面车辆目标以及空中鸟类目标等;雷达资源管理和波束调度则根据雷达检测的目标信息,合理的分配雷达照射方向和时间,确保真实目标的有效跟踪并防止目标的遗漏。
达数据处理部分主要包括:数据融合、轨迹管理、目标识别以及雷达资源管理和波束调度。数据融合则将多个阵面的雷达检测数据进行聚类融合;轨迹管理则进行点迹和航迹的匹配以及目标航迹的滤波处理;目标识别则通过雷达检测的目标特征信息进行判断,去除地面车辆目标以及空中鸟类目标等;雷达资源管理和波束调度则根据雷达检测的目标信息,合理的分配雷达照射方向和时间,确保真实目标的有效跟踪并防止目标的遗漏。
系统设计的主要关键技术包括:
1. 以极低距离盲区监视覆盖,实现对“低”、“慢”、“小”目标的探测;
2. 平台运动状态下雷达杂波的抑制技术;
3. 相控阵雷达资源管理和波束调度技术;
4. 雷达目标识别技术;
5. 多面阵雷达数据融合和轨迹跟踪处理技术;
传统地基非移动式雷达,利用回波信号的多普勒信息,可以通过对雷达回波序列进行一维多普勒滤波处理,能够将运动目标从静止杂波背景中分离出来。然而,动平台移动式雷达由于自身的运动,使得静止的地面杂波块对于雷达也是运动的,而且不同角度的杂波块与车辆的相对速度是不同的,导致了平台运动时各个不同角度杂波块所对应的多普勒频率是不同的,也就是对应于方位角θi 的归一化多普勒频率 fd,i=2vsin θi ·Tr/λ 是各不相同的。因此,导致了如下两个事实:
θi ·Tr/λ 是各不相同的。因此,导致了如下两个事实:
1. 传统时域一维处理不再奏效
不同方向的杂波多普勒频率是不同的,雷达接收全方位杂波的多普勒被严重展宽,运动目标 的多普勒频率与地杂波的频谱可能相互重叠。
2. 仅依靠空域波束形成无法有效抑制地杂波
从波达方向看,运动目标和杂波依然混叠在一起,仅依靠空域波束形成无法将目标和杂波相分离,尤其是主瓣杂波。
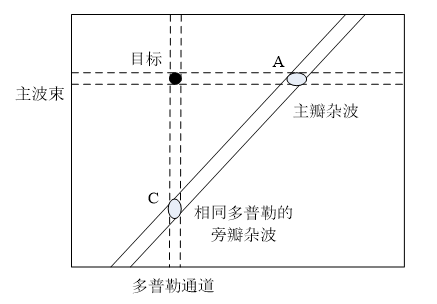
鉴于以上的事实,使得同时从空域和时域进行杂波抑制成为一种必要的手段。一般来说,虽然既存在与目标波达方向相同的杂波,也存在与目标多普勒频率相同的杂波,但是二者同时满足的情况概率不大,所以使得空域和时域联合处理提高检测性能成为可能。
对于相控阵和MIMO雷达杂波谱,在正侧视情况下,杂波脊在方位-多普勒平面内为一斜线,所以某个方向的具有某种速度的目标除要与处于同一方向的主瓣杂波竞争外,同时还需与不同方向但具有相同多普勒频率的旁瓣杂波竞争。
空时自适应处理在实际应用中存在计算复杂度过高和杂波协方差矩阵估计困难等问题,可采用空-时域及角度-多普勒域STAP处理。对于降维STAP,空-时域数据输出首先需要变换到角度-多普勒域,形成角度-多普勒二维通道,其中一个通道选定为主通道,再选择若干通道作为辅助通道进行自适应处理。
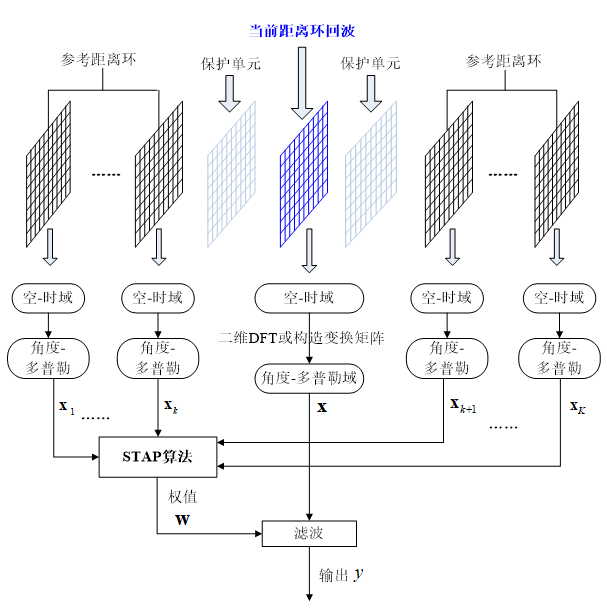
值得注意的是,空-时域向角度-多普勒域变换,对于相控阵雷达可以简单地通过二维离散傅立叶变换(DFT, Discrete Fourier Transform)实现,也可以通过构造变换矩阵的方法实现,而变换矩阵方法更具有通用性,对于MIMO雷达也同样适用,可通过构造变换矩阵的方法实现变换。