4D成像雷达中的距离徙动及补偿方法分析
在4D成像雷达的信号处理过程中,为提高回波信号的信噪比(SNR),增加雷达的探测感知能力,采用脉冲积累的方式来做2DFFT,SNR的增量与脉冲积累数相关。但当脉冲积累的时间过长,或者目标运动速度过快,回波信号在脉冲积累时,会发生跨距离单元现象,产生距离徙动,分散目标能量,影响雷达检测性能。
为讨论距离徙动影响和对应补偿方法,建立以下仿真模型。在一个距离分辨率为![]() ,脉冲调制周期为
,脉冲调制周期为![]() 的系统中,假设第一个距离单元
的系统中,假设第一个距离单元![]() 对应的距离为
对应的距离为![]() ,目标距离
,目标距离![]() ,
,![]() 对应的距离单元个数为
对应的距离单元个数为![]() 。目标以径向速度
。目标以径向速度![]() 靠近雷达,回波信号中目标在第
靠近雷达,回波信号中目标在第![]()
![]() 个脉冲上的距离表示为:
个脉冲上的距离表示为:
![]()
(1)
此时,目标对应的距离门为![]() ,时间延迟为
,时间延迟为
![]()
(2)
发射雷达信号
![]()
(3)
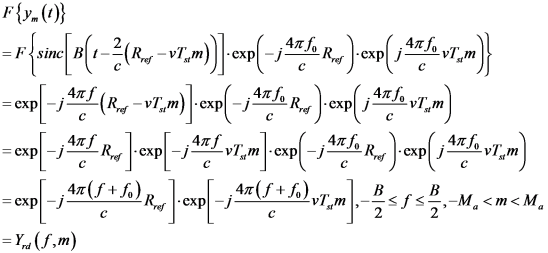
则第![]() 个脉冲的回波信号
个脉冲的回波信号

(4)
上式进行下变频后,得到基带信号

(5)
上式通过匹配滤波器,设![]() 通过匹配滤波器后的波形为
通过匹配滤波器后的波形为![]() ,B为
,B为![]() 的带宽。则通过匹配滤波器后波形为
的带宽。则通过匹配滤波器后波形为
![]()
上式为连续信号,进行离散化后信号可得到第![]() 个脉冲的快时间采样向量为
个脉冲的快时间采样向量为

(7)
得到快-慢时间矩阵
![]()
(8)
距离徙动后频谱如下:

发生距离徙动的原因是在一个CPI内,目标跨越了多个距离门。目标在第![]() 个脉冲相对于0脉冲运动距离为
个脉冲相对于0脉冲运动距离为![]() 。对第
。对第![]() 个脉冲,目标在快时间上平移
个脉冲,目标在快时间上平移![]() 个距离单元即可在
个距离单元即可在![]() 的离散时间傅里叶变换(DTFT)为
的离散时间傅里叶变换(DTFT)为![]() 。根据DTFT的时移性质,可由下面方式实现距离平移补偿
。根据DTFT的时移性质,可由下面方式实现距离平移补偿
![]() (9)
(9)
其过程如下图所示。

以某一速度进行补偿,其结果如下图。可以看到,目标1进行补偿后,距离不再徙动,进行MTD后信号增强。


上面只是利用了傅里叶变换的时移性质,将快时间维的距离补偿变换至频域进行操作,并未给出快时间向量频域的数学形式,现对其说明。
在没有发生距离徙动的理想情况下,假设目标在1个CPI内没有位移,但是有速度,这种假设条件下,1个CPI内所有脉冲的快时间向量通过匹配滤波器后都为 。根据傅里叶变换的时移性质
。根据傅里叶变换的时移性质
![]()
(10)
可知 的傅里叶变换为
的傅里叶变换为

(11)
理想情况下,慢时间维的多普勒频率![]() 的复正弦波以慢时间
的复正弦波以慢时间![]() 为采样时间间隔进行采样。因此,慢时间维信号可以表示为
为采样时间间隔进行采样。因此,慢时间维信号可以表示为
![]()
(12)
上文所述中,忽略距离徙动的快时间-慢时间矩阵为

(13)
对上式进行FFT得到

考虑实际距离徙动,对(6)进行FFT,得到
比较(14)和(15)可以看出,理想情况下![]() 和
和![]() 没有交叉项,发射距离徙动时存在
没有交叉项,发射距离徙动时存在![]() 和
和![]() 的交叉项。当
的交叉项。当![]() 时,慢时间的相比变化率比理想情况下大;当
时,慢时间的相比变化率比理想情况下大;当![]() 时,慢时间的相位变化率比理想情况下小;当
时,慢时间的相位变化率比理想情况下小;当![]() 时,式(14)和式(15)一致。校准距离徙动即找到方法消除
时,式(14)和式(15)一致。校准距离徙动即找到方法消除![]() 和
和![]() 的交叉项。
的交叉项。
一种方法是,在(15)后乘![]() (
(![]() )消除
)消除![]() 和
和![]() 的交叉项,这实际上就是上面通过距离平移补偿的方法,这种方法必须准确知道目标的速度
的交叉项,这实际上就是上面通过距离平移补偿的方法,这种方法必须准确知道目标的速度![]() ,并且只能校正一个目标的距离徙动。
,并且只能校正一个目标的距离徙动。
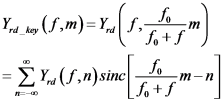
另一种方法是通过慢时间坐标变换来进行距离徙动的校正,也就是keystone方法。考察(15)式的慢时间项,它在时刻![]() ,对复正弦信号的采样,将慢时间项写成连续时间的函数,即
,对复正弦信号的采样,将慢时间项写成连续时间的函数,即

(16)
定义
![]()
(17)
则

可以看到,式(18)通过坐标尺度变化,消除了![]() 和
和![]() 的交叉项,变为理想的情况。此时只需要对快时间维进行逆FFT变换,对慢时间维进行傅里叶变换,即可以得到“聚焦”的距离-多普勒图像。
的交叉项,变为理想的情况。此时只需要对快时间维进行逆FFT变换,对慢时间维进行傅里叶变换,即可以得到“聚焦”的距离-多普勒图像。
常见的keystone实现方法有sinc插值法、DFT-IFFT算法和CZT算法三种。
1) Sinc插值算法
坐标转换前后如下图所示。变换前的数据点如绿色实心点所示,在快时间频率-慢时间域上呈现矩形形式排列。此时对于任意的快时间频率![]() ,对应的慢时间采样间隔(等效脉冲重复间隔)都是一样的。keystone变换本质上对原格式数据根据快时间频率
,对应的慢时间采样间隔(等效脉冲重复间隔)都是一样的。keystone变换本质上对原格式数据根据快时间频率![]() 进行插值处理,插值后的数据点如红色空心圆所示。
进行插值处理,插值后的数据点如红色空心圆所示。

可以看到,![]() 时,进行了坐标拉伸操作,
时,进行了坐标拉伸操作,![]() 越大,慢时间采样间隔越大;
越大,慢时间采样间隔越大;![]() 时,采样点位置没有发生变化;
时,采样点位置没有发生变化;![]() 时,进行了坐标压缩操作,
时,进行了坐标压缩操作,![]() 越小慢时间采样间隔越小。插值后的数据点形成一个倒梯形的形状,这也是“keystone”名称的由来。插值完成后,需要再将插值的数据点重新排列成之前的矩形形式,此时Keystone变换完成。
越小慢时间采样间隔越小。插值后的数据点形成一个倒梯形的形状,这也是“keystone”名称的由来。插值完成后,需要再将插值的数据点重新排列成之前的矩形形式,此时Keystone变换完成。
sinc插值法利用率采样定理的思想。该方法将已有的信号按照快时间相同频率进行分组,分别对每组进行处理,将其作为连续信号的采样样本值,通过使用低通滤波器对该信号滤波得到连续信号,再对该连续信号所需要的点进行再次采样实现插值。理想低通滤波器在频域上是一个矩形窗,对应时域为Sinc函数。频域相乘等于时域卷积,为了在时域上重建信号,需要把采样后的信号与Sinc函数进行卷积计算。
离散卷积的表达式为
![]()
(19)
则Sinc插值法可以表示为
(20)
经过keystone变换后,1个CPI内慢时间脉冲数取值范围变为
![]()
(21)
当![]() 时,
时,![]() 取值范围大于
取值范围大于![]() ;当
;当![]() 时,
时,![]() 的取值范围小于
的取值范围小于![]() 。在实际应用时,一般限制keystone校正后的脉冲数仍为
。在实际应用时,一般限制keystone校正后的脉冲数仍为![]() 。
。
2) DFT_IFFT算法
DFT-IFFT算法是根据傅里叶尺度变换的性质得到的,首先回顾傅里叶变换的尺度变换性质。
![]()
(22)
为了从![]() 得到
得到![]() ,可以先对
,可以先对![]() 的慢时间维进行傅里叶变换得到
的慢时间维进行傅里叶变换得到![]() ,如果可以得到
,如果可以得到![]() ,则对k进行逆傅里叶变换即可得到
,则对k进行逆傅里叶变换即可得到

(23)
DFT的表达式
![]()
(24)
第一次傅里叶变换采用变换尺度的DFT变换直接得到![]() ,即
,即
![]()
(25)
然后再对![]() 的k做逆傅里叶变换
的k做逆傅里叶变换
![]()
(26)
需要注意的是,FFT算法是利用了![]() 的周期性和对称性才能实现,而第一次DFT的傅里叶变换基是变尺度的,因此不能使用FFT实现。第二次的逆傅里叶变换可以使用FFT快速算法。因此这种实现方法称为DFT-FFT算法。如果发生速度模糊,则需要补偿。
的周期性和对称性才能实现,而第一次DFT的傅里叶变换基是变尺度的,因此不能使用FFT实现。第二次的逆傅里叶变换可以使用FFT快速算法。因此这种实现方法称为DFT-FFT算法。如果发生速度模糊,则需要补偿。
3) CZT算法
DFT-IFFT算法中指出,由于存在尺度上的不同,第一次只能采用DFT进行运算,大大增加了运算量。根据上面分析,当求keystone变换后慢时间对应的多普勒域时,尽管存在尺度上的不同,若仍以未变换前的慢时间对应的多普勒域表示频谱采样点的位置时,K个采样点在单位圆上的分布间隔变为
![]()
(27)
它是关于![]() 的函数,不再是在整个圆周上均匀分布,这也是不能应用FFT进行计算的原因。Chirp-Z变换(CZT)是求上述非等间隔情况下各点采样值的快速算法,其基本原理是采用螺线抽样,求各采样点有限长序列
的函数,不再是在整个圆周上均匀分布,这也是不能应用FFT进行计算的原因。Chirp-Z变换(CZT)是求上述非等间隔情况下各点采样值的快速算法,其基本原理是采用螺线抽样,求各采样点有限长序列![]() 的z变换为
的z变换为
![]()
(28)
为了使得可以沿着z平面更一般的路径取值,故沿z平面上的一段螺线作等分角的采样,记采样点为
![]()
(29)
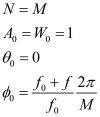
其中,M为所要分析的复频谱点数,不一定等于N;

(30)
![]() 为起始抽样点
为起始抽样点![]() 的矢量半径长度;
的矢量半径长度;
![]() 为起始抽样点
为起始抽样点![]() 的相角;
的相角;
![]() 为螺线的伸展率,
为螺线的伸展率,![]() 表示半径为
表示半径为![]() 的一段圆弧。若又有
的一段圆弧。若又有![]() ,则这段圆弧是单位圆的一部分;
,则这段圆弧是单位圆的一部分;
![]() 为两相邻抽样点之间的角度差。
为两相邻抽样点之间的角度差。
当M=N,![]() ,
,![]() 时,各采样点
时,各采样点![]() 均匀等间隔地分布在单位圆上,就是序列DFT。此时,如果取
均匀等间隔地分布在单位圆上,就是序列DFT。此时,如果取![]() ,
,![]() 为任意值,则所求的DFT是一段任意频率范围的频谱,也就是单位圆上某一段的频谱。这与直接计算DFT求整个频率范围的频谱是不一样的,即使调整N的大小,例如增加N,也只能增加一段频率范围的计算量而已。
为任意值,则所求的DFT是一段任意频率范围的频谱,也就是单位圆上某一段的频谱。这与直接计算DFT求整个频率范围的频谱是不一样的,即使调整N的大小,例如增加N,也只能增加一段频率范围的计算量而已。
将![]() 带入
带入![]() 变换的表达式中,得
变换的表达式中,得

(31)
其中

(32)
将线性卷积用循环卷积进行计算,从而可以变换到频域用FFT进行快速运算。下面给出CZT的实现流程图。

使用CZT进行keystone变换,只需令
(33)
即![]() ,
,![]() ,然后按照CZT的计算歩奏进行计算。
,然后按照CZT的计算歩奏进行计算。
在一个CPI内,雷达与目标之间的距离一直在变化,该变化对应雷达接收的回波信号产生时延差。如果距离变化超过一个距离分辨单元,就会导致距离徙动。距离徙动会导致4D成像雷达目标回波信号能量分散,信噪比降低,影响成像质量。可通过距离徙动校正算法,将距离徙动曲线校正为平行于方位向的直线,其斜距的变化小于距离分辨单元的一半,满足在一个CPI内,目标距离变化不超过一个距离分辨单元。