4D成像雷达在交通应用中的实测分析
在交通强国战略背景下,智慧交通领域正不断推动前沿信息技术与传统交通行业的深度融合。发展智慧交通可保障交通安全、缓解拥堵难题、减少交通事故、提升交通通行效率。同时,智慧交通的创新应用也需要前端路侧感知设备采集的交通数据信息。作为智慧交通领域中具有极其重要应用的路测感知设备,雷达可以提供可靠、实时和准确的检测数据流信息,在技术和成本上具有优势。
传统的智慧交通解决方案通常为在交通系统每个节点安装传感器。可获得包括视频、线圈、微波检测和地磁检测等多种前端探测传感器的感应信息。但传感器之间信息呈现出碎片化、单一化、被动化等特点,无法满足新型智慧交通对交通数据流的实时性、全面性和主动性的需求。传统交通感知设备存在以下痛点:
- 成本过高:单设备覆盖距离近,实现全路段覆盖的成本过高,无线实现真正的全路段智慧交通;
- 感知要素不够精细、质量较差:感知要素维度、密度、分配密度较低,设备漏报率高、准确率低,不能还原交通场景,难以支撑车路协同等应用场景;
- 难以全天时、全天候工作:如雨、雾、沙尘暴和黑夜等各种天气状况对感知设备的感知能力影响较大,无法做到在各种气象条件下的7*24h不间断工作;
- 交通事件检测能力不足:检测手段单一,探测信息不够丰富,智能化分析手段不足,系统无法对如交通事故和交通违章等事件有效判断;
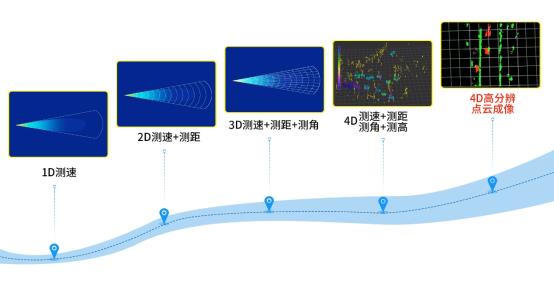
雷达在交通领域中的应用随着雷达技术的发展也在实时更新,早期的1D雷达,仅能提供目标速度信息,主要应用是雷达测速;2D雷达提供测速和测距功能,主要应用是断面检测;3D雷达提供测速、测距和水平测角功能,可对道路上的目标定位,主要应用是信控;4D雷达提供测速、测距、水平测角和俯仰测角功能,可对目标物高度信息解析,主要应用是交通流量监测;4D高分辨点云成像在4D雷达基础上,实现环境目标的高分辨点云成像,通过探测输出静态和动态目标,可描绘出实时道路状况,还原交通场景,丰富交通感知信息。
在交通监测中采用4D高分辨点云成像雷达,可通过雷达成像能力,丰富感知要素,达到像素级识别效果;可通过4D探测,在传统3D雷达基础上多一个测量维度,提升交通事件监测能力;由于基本原理仍然是“毫米波雷达”,可保证系统的全天时、全天候工作能力。通过雷达立体扫描、点云成像,可实现每秒50万点+的点云信息输出,达到图像级雷达。
我司4D成像雷达可实现300m范围内目标探测,可对交通道路上的静止目标和运动目标点云成像。具有以下特点:
- 高分辨点云成像
- 探测距离远、探测灵敏度高
- 道路交通场景实时动态还原
- 可精确感知车辆长度和道路拥堵排队情况
- 可区分道路横杆、路牌等空中目标
- 以极高准确率识别交通参与者类型
- 可对交通违章行为、交通事件有效监测
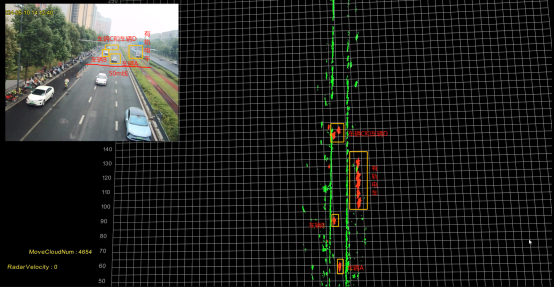
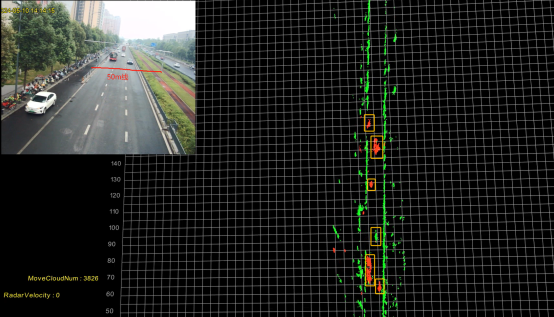
上图实时测试画面中,左上角为现场实时摄像头画面,右边为雷达输出到显控软件上的实时数据。显控软件的每一小格代表的物理距离尺寸为5m*5m,有轨电车在显控软件中占据的空间为7*1格,则有轨电车长度约为35m。由于安装原因,主道路的监测车道为三车道,在50m外,主道路上共有四辆车,可在显控软件中观测到其对应的距离分别为:60m,90m,145m,150m左右,每辆车均可通过点云信息描绘出轮廓。
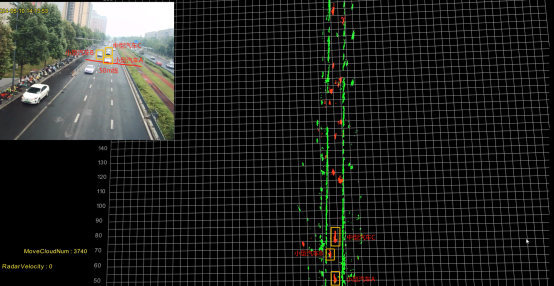
上图中,在中间车道50m左右处有一辆小型汽车A,在左边车道65m左右处有一辆小型汽车B,在中间车道75m处,有一辆中型汽车C。通过比对左上角的视频画面和右边的显控软件实时显示情况,可以明显看出,显控软件中中型汽车C的点云成像结果描绘的目标轮廓明显要长于小型汽车A和小型汽车B描绘的目标轮廓长度。
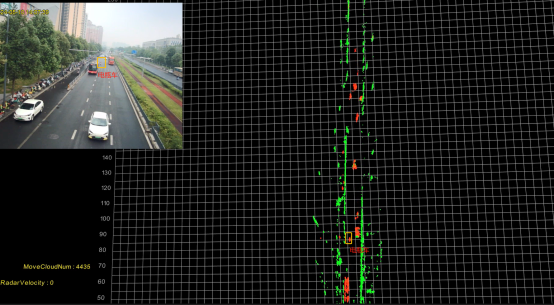
上图中,在50m显示线外,按距离由近及远,从左上角视频画面可以看出共有六辆车,其中第1,3,4,6辆车为小型汽车,第2,5辆车为大型汽车(公交车和卡车)。在右边显控软件的显示界面中,也可明显看出,第2和第5辆车点云成像结果描绘的轮廓长度明显长于第1,3,4,6辆车。
上图中,雷达可检测到电瓶车,也可以对电瓶车进行点云成像,根据成像结果描绘的目标轮廓可知,电瓶车的长度约为1/3个格子长度,符合电瓶车真实长度。
从上面4D成像雷达在交通应用的实测分析可以看出,4D成像雷达通过对道路交通环境和交通参与者的实时高分辨点云成像,可提供可靠、实时和准确的检测数据流信息,满足智慧交通路测感知设备需求。